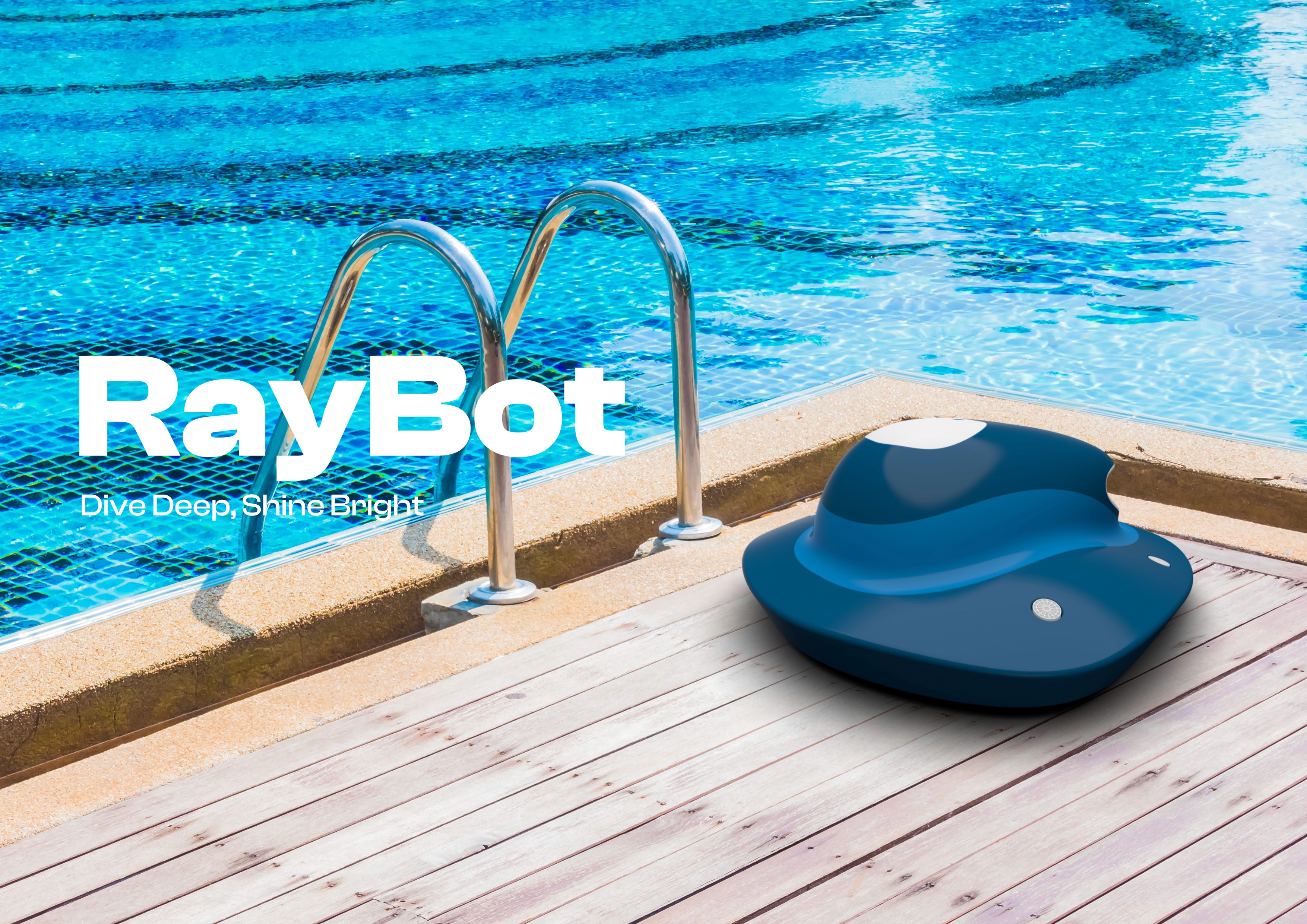
RayBot
Wireless and Intelligent Pool Cleaning Robot
RayBot is a wireless pool-cleaning robot inspired by the sleek form of a stingray. Designed for effortless navigation, its advanced jet control system enables precise wall cleaning, combining aesthetics with functionality for an efficient maintenance solution.
Course
Industrial Form Development
Tools
Siemens NX Vizcom Affinity
Project Type
Individual academic project
Date
october 2024 - january 2025

CONTEXT
The goal was to design a system for vacuuming waste, requiring a thorough exploration of all aspects of product design.
Concept Development: A pool cleaning robot was created, balancing functionality and aesthetics.
Design Process: Started with a moodboard, followed by an idea generation phase with over 100 sketches exploring various forms.
Refinement: Using different form development techniques, the final design was carefully shaped and optimized.
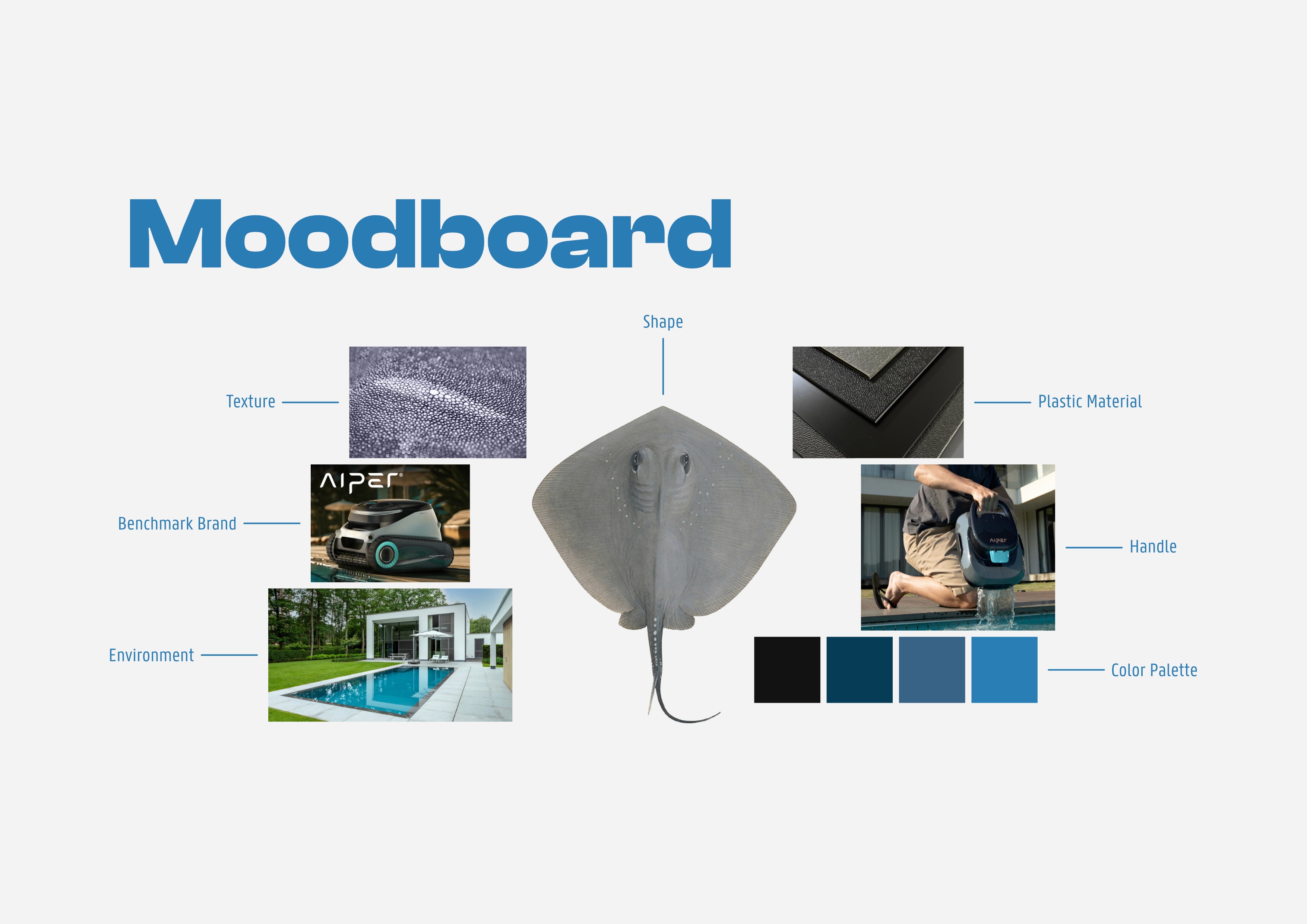
MOODBOARD
The design of the pool cleaning robot is inspired by the organic form of a stingray, a graceful creature that glides effortlessly across the ocean floor—much like how the robot is intended to move along the pool surface.
Natural Influence: The stingray’s fluid motion, subtle textures, and deep sea colors shape the robot’s aesthetics.
Benchmark Brand: Aiper was selected for its strong design identity and refined aesthetics.
Target Market: Designed for private luxury pools, combining elegance and functionality.
Technical Features: Includes an ergonomic handle for easy handling and durable ABS plastic, resistant to water, UV exposure, and chlorine.
SKETCHES & 3D MODELS
Over 100 sketches were explored, inspired by the stingray, ranging from abstract geometric shapes to fluid, organic forms.
Design Considerations: The built-in dirt basket influenced the product’s architecture, requiring additional volume.
Final Form: A rounded, organic shape was chosen for both aesthetics and functionality, avoiding sharp edges to prevent damage during contact with pool surfaces and walls.
The 3D modeling process began in Siemens NX:
Subdivision modeling was used for quick visualizations and iterations.
Due to SubD limitations, the design transitioned to surfacing for greater precision.
The base form was developed first, followed by detailed integration of jets, brushes, and wheels to refine the design.


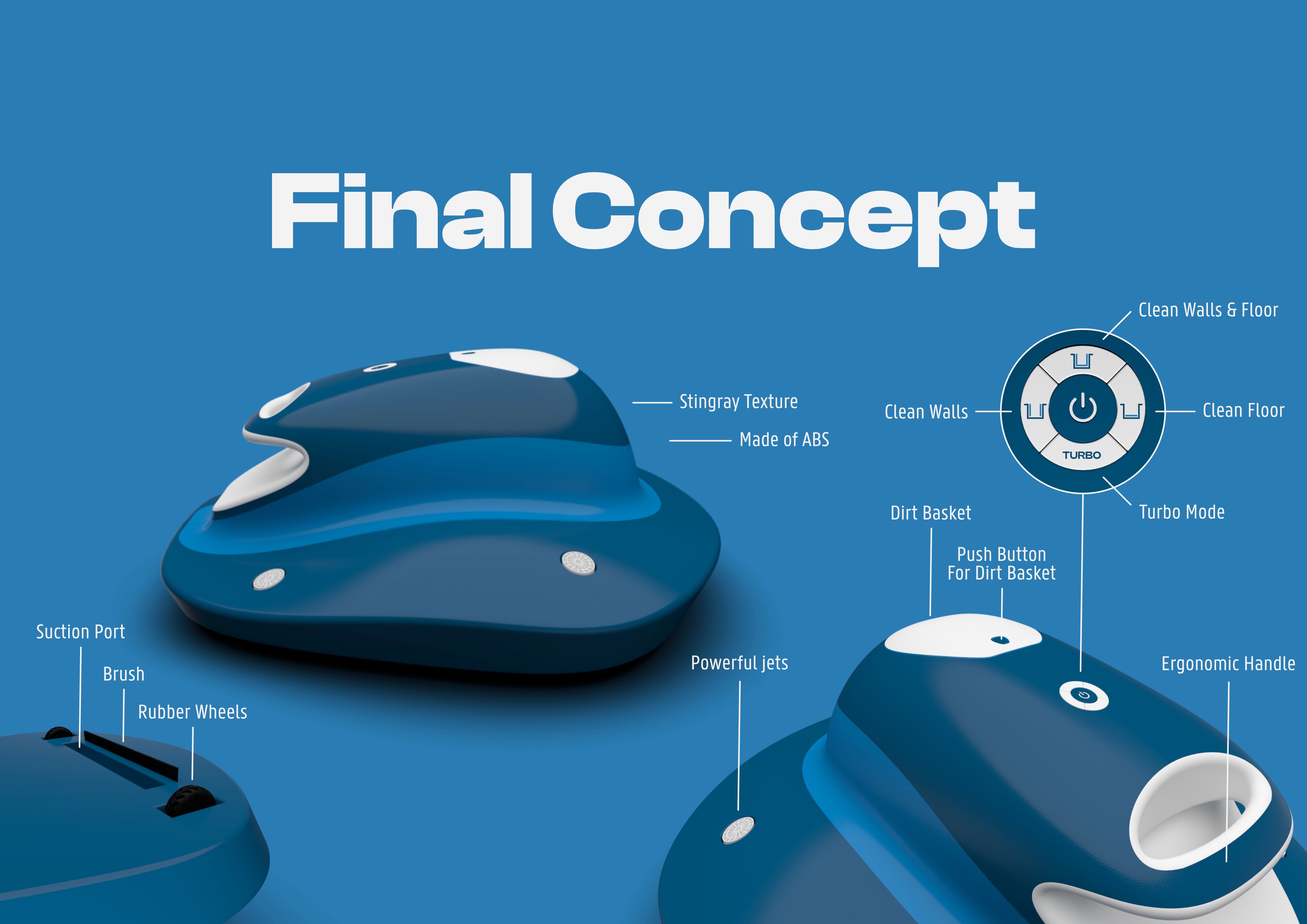
OUTCOME
The result is a wireless, intelligent pool cleaning robot designed for effortless and efficient maintenance.
Hydrodynamic Design: Inspired by the stingray, its sleek, organic shape enhances movement, while powerful jets allow it to glide smoothly over the pool floor and walls.
Premium Materials: The ABS body features a soft, stingray-inspired texture that conceals scratches while maintaining a glossy, luxurious look.
Intuitive Features:
Control panel with cleaning modes for floor, walls, both, or turbo mode for deep cleaning.
Suction port with brushes and rubber wheels for optimized dirt removal.
Easy-to-empty dirt basket with a simple push button mechanism.